
2021/05/09 I assembled the BlueROV2 for the first time and equipped it with a manipulator, successfully grabbing a hammer.

2021/07/19 We modified it with an 8-thruster frame, along with a pan-tilt platform and a binocular camera. Partners: J. Lin and L. Zhang.
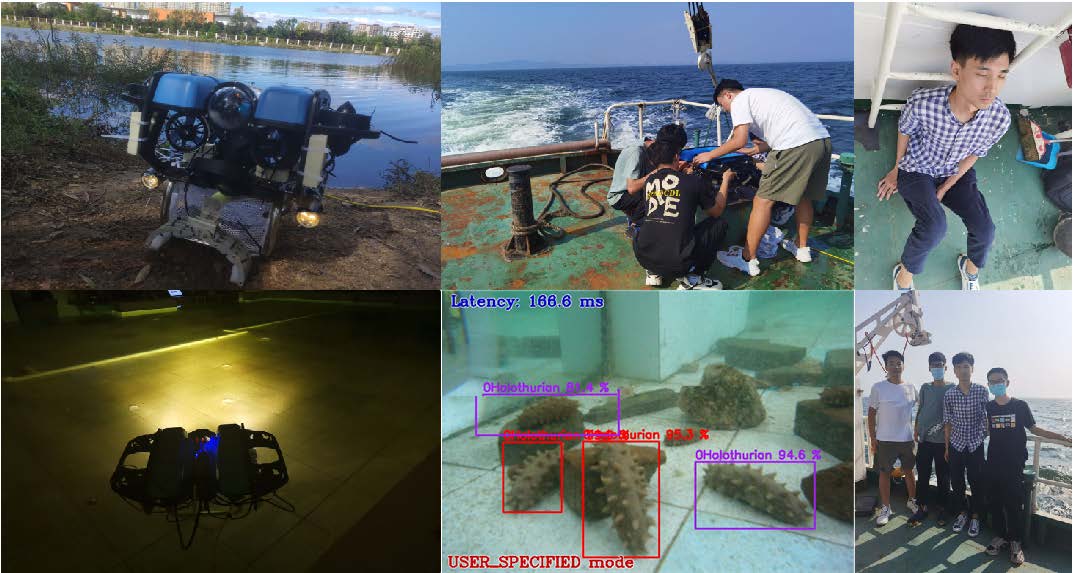
We added a homemade manipulator and two diving flashlights to it, and integrated target recognition algorithms. The first marine experiment was carried out on 2021/09/08. Partners: K. You, L. Zhang, and J. Lin.

2021/09/24 URPC2021 in Jinshitan, Dalian. Our Yanxiang robot successfully completed the grasping and line patrol operations. But it unfortunately leaked and exploded during the fully autonomous competition.
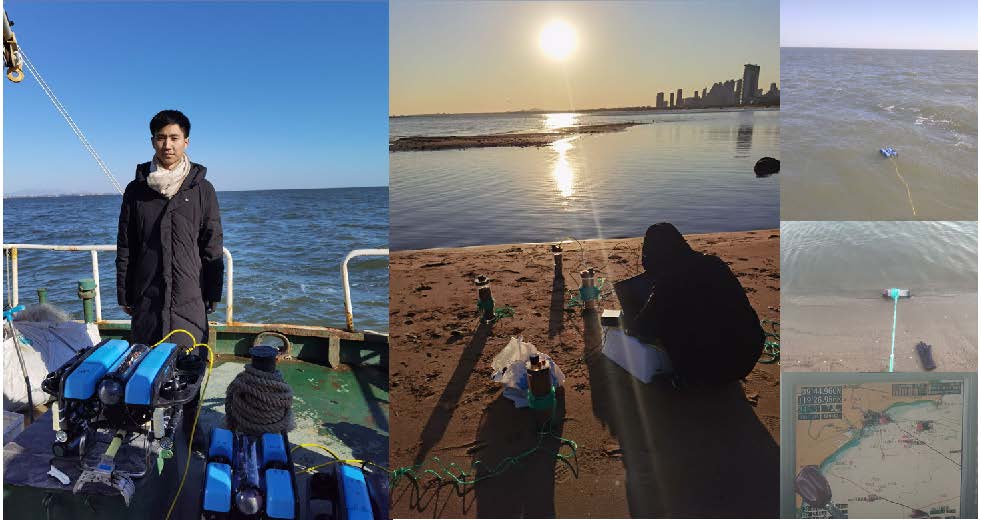
Dec. 2021. I tested the repaired Yanxiang and two assembled ROVs, along with integrated hydroacoustic device with J. Lin and L. Zhang.

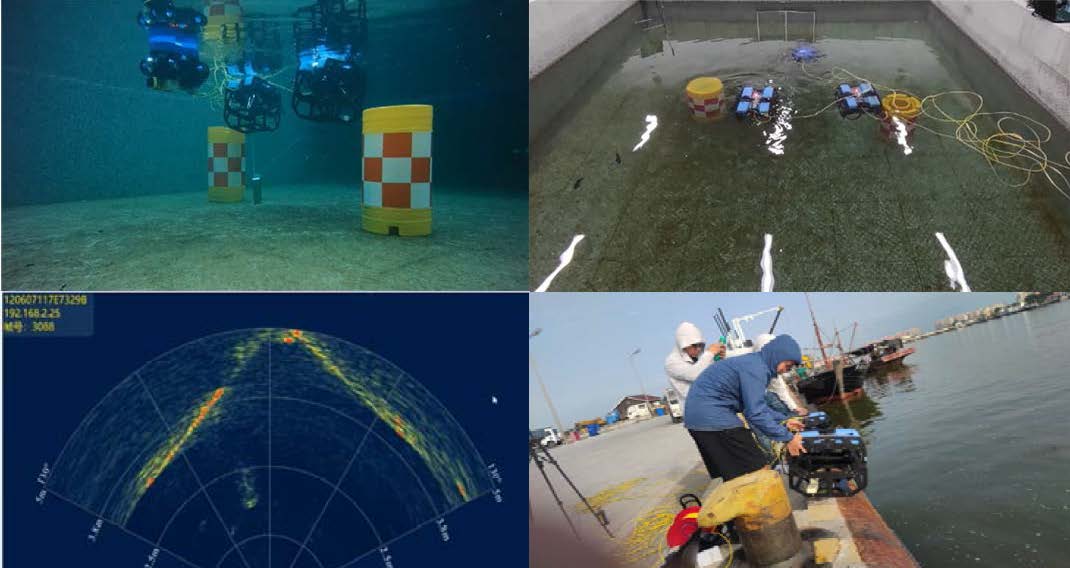
2022/03/27. We have equipped ROVs with expandable frames to carry hydroacoustic device. Partners: W. Cao, J. Lin and L. Zhang.
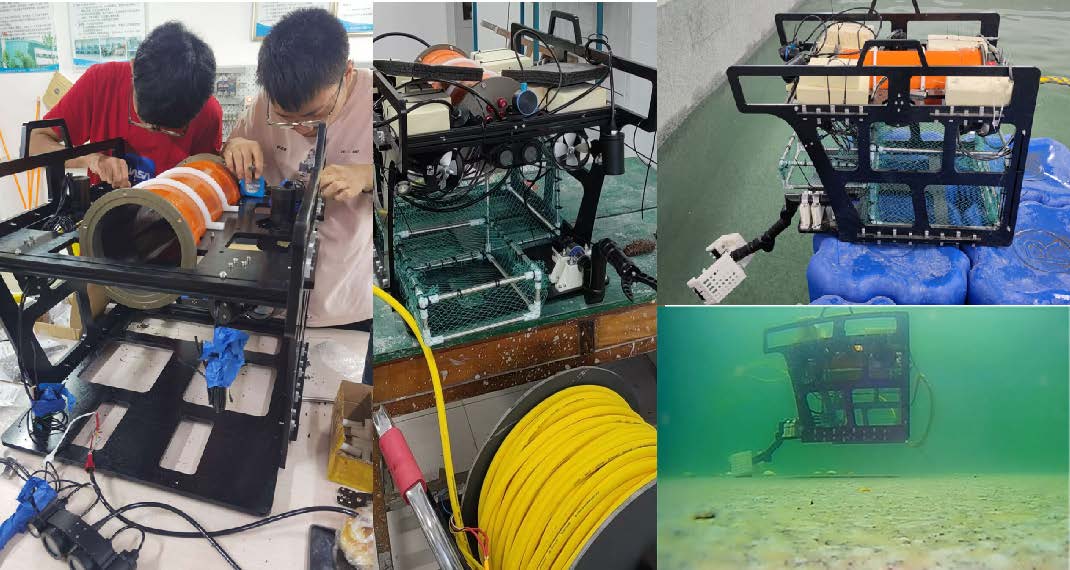
From 2022/08/24 to 2022/10/11, we constructed a medium size ROV Yanxiang II for URPC2022, which is equipped with a 5-DOF manipulator from Blueprint. Partners: L. Zhang, J. Lin, and Y. Liu.

2022/11/19 I tested a simple underwater teleoperation system, where SBL system was used for self-localization of underwater vehicle. Terrestrial transmission was completed a aerial image transmission by SIYI.

2023/03/09 System Upgrade. We achieved cross-sea remote control of underwater vehicle. Partners: H. Wang, Q. Yang, and T. Zhang.

2023/04/09 A teleoperation formation control experiment in the lake. Partners: H. Wang and M. Yi.
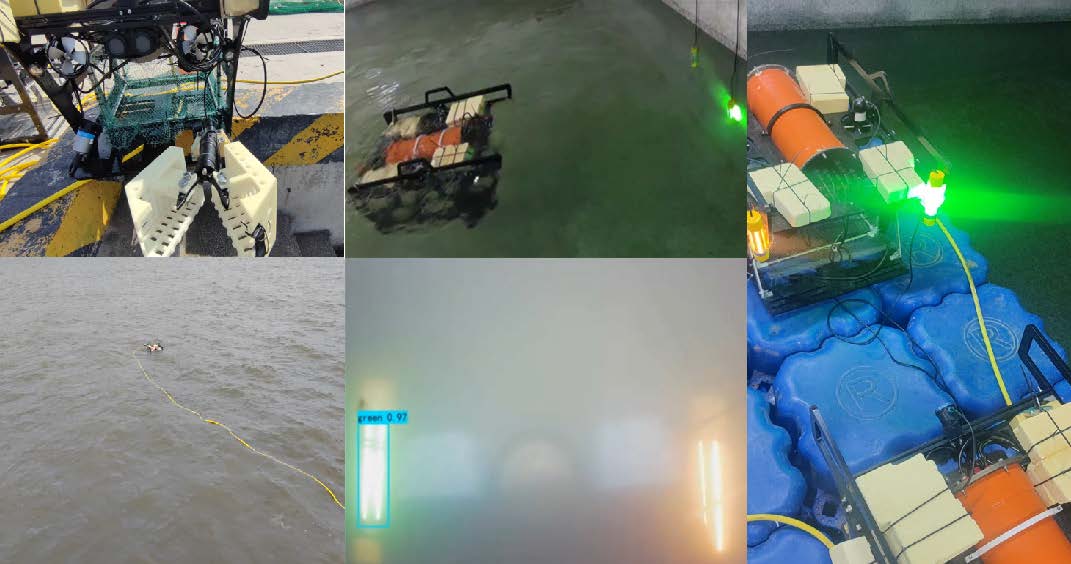
Use Yanxiang II to recognize and grasp underwater light beacon. The experiment was finally conducted in the Bohai Sea from July 2023 to Oct. 2023.

2023/11/06 Vessel waterline monitoring project at Tangshan Port. I participated the preliminary data collection and served as a technical consultant for the project group. Partners: Q. Yang and J. Zhu.

From Apr. 2024 to June 2024, we developed an underwater search and rescue vehicle with imaging sonar. Partners: T. Zhang and T. Zhang.
Aug. 2024. A experiment for payload transportation of ROVs. Partners: T. Guo, T. Zhang, and Z. Tian.